
Müasir dünyada mövcud olan əksər robotlar hərəkət etmək üçün müəyyən mühərriklərə əsaslanır. Bununla belə, elektro-hidravlik əzələ sistemi ilə robotların elektrik mühərrikləri yerinə əzələlərdən güc aldıqları yeni bir dövr başlayır.
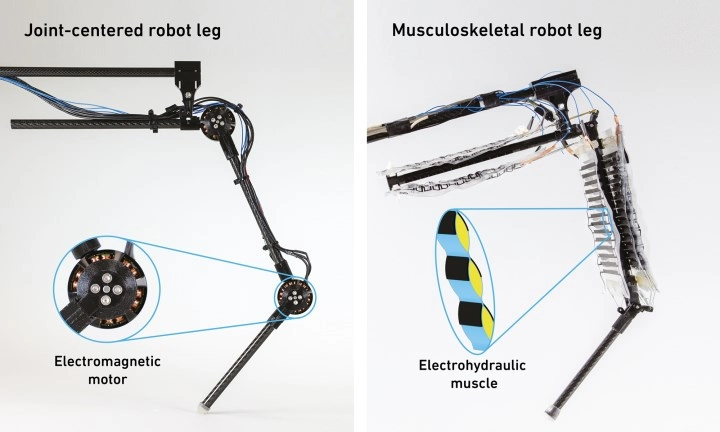
ETH Zurich və Maks Plank İnstitutundan olan tədqiqatçılar əzələ ilə işləyən robot ayağının yeni nəslini hazırladıqlarını açıqlayıblar. Bu yenilik robot texnologiyasında inqilab yarada və mövcud mühərriklərlə işləyən robotlardan daha çevik və mobil robotlara yol aça bilər. Əzələ sistemi ilə işləyən robot ayağı, heyvanların əzələ quruluşunu təqlid edərək tullanmaq və kobud əraziyə uyğunlaşmaq kimi mürəkkəb hərəkətləri yerinə yetirə bilir. Tədqiqat qrupu heyvanların əzələ quruluşundan ilham alaraq bu robot ayağının iş prinsipini hazırlayıb. “Əzələ-hərəkət sistemi” adlanan bu quruluş süni əyilmə və ekstensor əzələlərlə hərəkət edir.

Robot skeletinə bağlanan bu əzələ elektro-hidravlik ötürücülər vasitəsilə işləyir. Aktuatorlar yağla doldurulmuş plastik torbalardan ibarətdir və elektrik verildikdə torbalar qısalaraq hərəkətə keçməyə imkan verir. Bu sistem canlılarda görülən ikiqat əzələ hərəkətlərini təqlid edərək, bir əzələnin büzülməsinə, digərinin isə rahatlamasına imkan verir. Süni əzələlərin hərəkəti torbalara tətbiq olunan elektrik gərginliyi ilə idarə olunur. Torbalara yerləşdirilən elektrodlara tətbiq olunan gərginlik artdıqca, elektrodlar bir-birinə yaxınlaşaraq yağın ötürücüyə sürüşməsinə və çantanın qısalmasına şərait yaradır. Bu sadə, lakin effektiv sistem robot ayağının çevik və tez reaksiya verməsini təmin edir.