































Mərkəzi Nəzarət və ya əvvəlcədən planlaşdırılmış strategiya olmadan kollektiv şəkildə hərəkət edərək təsirli strukturlar yarada bilən qarışqalardan ilhamlanan tədqiqatçılar oxşar yanaşmanı robot sistemlərinə köçürməyi bacarıblar. Harvard Universitetinin Con A. Paulson Mühəndislik və Tətbiqi Elmlər Məktəbinin (SEAS) tədqiqatçıları tərəfindən hazırlanan “RAnts” adlı robot qarışqalar mərkəzi əmr sistemi və ya ətraflı proqramlaşdırma olmadan özünü təşkil edən bir quruluş təklif edir. Bu robotlar, əsl qarışqalar kimi, mürəkkəb strukturlar qurmaq və lazım olduqda onları sökmək üçün birlikdə işləyə bilərlər. Üstəlik, bunu heç bir plana, liderə və ya birbaşa ünsiyyət mexanizminə ehtiyac olmadan edirlər.
Bu sistemin arxasındakı ən təəccüblü konsepsiya “çıxarılmış zəka” yanaşmasıdır. Bu yanaşmaya görə, zəka yalnız robotların içərisindəki proqram təminatından və ya aparatdan qaynaqlanmır; əksinə, robot və ətraf mühit arasında davamlı qarşılıqlı təsirdən yaranır. Beləliklə, burada düşünmə prosesi fərdi vahidlər daxilində deyil, bütün kollektiv sistem daxilində baş verir. Tədqiqatın müəlliflərindən biri olan professor L. Mahadevanın sözlərinə görə, bu model sadə qaydaların necə birləşərək mürəkkəb və uyğunlaşa bilən davranışlar yarada biləcəyini açıq şəkildə nümayiş etdirir.
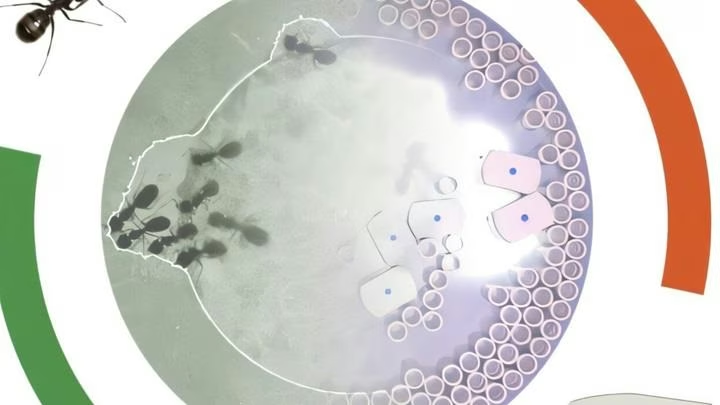
Real dünyada qarışqalar ünsiyyət qurmaq üçün feromonlar adlanan kimyəvi izlər buraxırlar. Bu izlər digər qarışqaların hansı istiqamətə getməli olduqlarını və ya hara işləməli olduqlarını müəyyən edir. Lakin Harvard komandası bu mexanizmi rəqəmsal mühitə köçürərək “fotormon” adlı işıq əsaslı bir sistem hazırladı. Robotlar bu işıq sahələrini aşkarlayaraq hərəkət edir və davranışlarını ətraf mühitdəki dəyişikliklərə uyğun olaraq yeniləyirlər. Bu proses biologiyada fərdlərin ətraf mühitdəki dəyişikliklərə cavab verərək dolayı yolla ünsiyyət qurmasına imkan verən “stiqmergiya” kimi tanınan prinsipə əsaslanır. RAnts sistemi kifayət qədər sadə qaydalar üzərində qurulub. Robotlar müəyyən siqnalları izləyir, bloklar daşıyır və müvafiq şərtlər yerinə yetirildikdə bu blokları buraxırlar. Lakin, bu sadə qaydalar bir araya gəldikdə, yüksək dərəcədə mütəşəkkil və çevik bir sistem ortaya çıxır. Bundan əlavə, sistemin davranışını dəyişdirmək üçün yalnız iki parametrin tənzimlənməsi lazımdır: işıq siqnallarına həssaslıq və blok düşməsi/həddi aşkarlama parametrləri. Bu parametrlər dəyişdirildikdə, robotlar dərhal rolları dəyişə, tikinti prosesindən söküntü prosesinə keçə bilərlər.
Tədqiqatçıların fikrincə, bu yanaşma gələcəkdə muxtar robot sistemləri üçün əhəmiyyətli bir alternativ təklif edə bilər. Bu model göstərir ki, mürəkkəb tapşırıqlar yalnız yerli qarşılıqlı təsirlərə və sadə qaydalara əsaslanaraq mərkəzi nəzarət olmadan yerinə yetirilə bilər. Bu tədqiqat həmçinin süni intellektin gələcəyinə fərqli bir baxış bucağı təqdim edir, çünki burada zəka fərdi sistemin tutumundan deyil, birdən çox agent və onların mühiti arasındakı dinamik qarşılıqlı təsirdən irəli gəlir. Bu, daha böyük və daha mürəkkəb “kəşfiyyat” sistemlərinin indiyə qədər təsəvvür etdiyimizdən çox fərqli şəkildə ortaya çıxa biləcəyini göstərir.











