

Mars roverləri bu günə qədər saysız-hesabsız elmi kəşflər etsə də, bu missiyaların qarşısındakı ən böyük maneələrdən biri onların hərəkətliliyidir. Xüsusilə boş qumlu ərazi təkərli roverlərin sürüşməsinə, ilişib qalmasına və ya tamamilə hərəkətsiz qalmasına səbəb ola bilər. Həqiqətən də, keçmişdə NASA-nın Spirit roveri oxşar səbəbdən missiyasını erkən başa vurmalı idi. İndi isə alimlər təbiətdən ilhamlanan qeyri-adi bir həll yolu hazırlayıblar.
Almaniyadakı Vürzburq Universitetinin tədqiqatçıları, Sahara səhrasında yaşayan və əsasən üzərək qumda hərəkət edə bilən bir kərtənkələ növündən ilhamlanaraq, qumlu ərazidə daha uğurlu hərəkət edə bilən eksperimental Mars roveri hazırlayıblar. Tədqiqatçılara “qum balığı” (Scincus scincus) kimi tanınan kiçik bir səhra kərtənkələsi ilham verib. Bu canlı yırtıcılardan qaçmaq və ya ov etmək üçün qumun altına girir və balıqların suda üzməsinə bənzər dalğalı hərəkətlərlə boş qumda hərəkət edir. Alimlər son illərdə bu qeyri-adi hərəkət mexanizminin necə işlədiyini daha yaxşı başa düşməyi bacarıblar. Bu biomexaniki məlumatlardan istifadə edərək, Vürzburq Universitetinin bir qrupu Mars roverləri üçün tamamilə yeni bir təkər dizaynı hazırladı.
Növbəti məqsəd: Daha ağıllı Mars roverləri
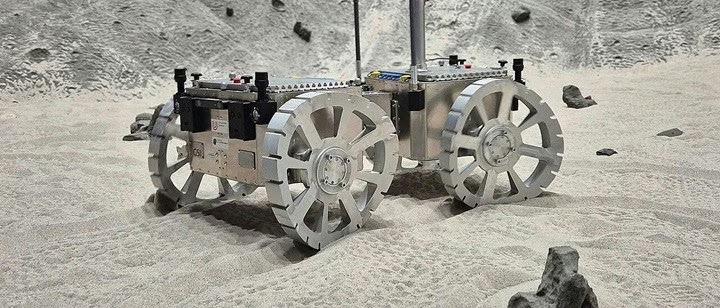
Yeni hazırlanmış dizayn klassik təkərlərdən fərqli bir iş prinsipinə malikdir. Tədqiqatçılar qum balığının qumla qarşılıqlı təsirini təqlid edən xüsusi təkərlər hazırladılar. Bu təkərlər təkcə irəli fırlanmır; həm də hərəkət zamanı həm irəli, həm də yan tərəfə qüvvə yaradır və qumda üzgüçülük kimi bir hərəkət yaradır. Təcrübələrdə nəqliyyat vasitəsinin arxasında qalan sinus dalğasına bənzər izlər bu mexanizmin gözlənildiyi kimi işlədiyini təsdiqləyir.
Tədqiqatçılar inkişaf etdirdikləri roveri (Sandfish) həm qumlu səthlərdə, həm də açıq ərazi şəraitində sınaqdan keçirdilər. Bremendə aparılan təcrübələr göstərdi ki, yeni dizayn boş qumda sabit hərəkət edə bilər. Növbəti mərhələdə tədqiqatçılar yalnız mexaniki dizayna diqqət yetirməyəcəklər. VaMEx layihəsi roverin yer sürüşməsini və qumun nüfuzetmə miqdarını real vaxt rejimində təhlil etməsinə və hərəkətini müvafiq olaraq tənzimləməsinə imkan verəcək yeni proqram sistemləri hazırlamağı hədəfləyir. Belə bir sistem, roverin təkcə daha yaxşı təkərlərə sahib olmasına deyil, həm də əraziyə uyğunlaşmasına və ən uyğun sürücülük strategiyasını müəyyən etməsinə imkan verə bilər. Tədqiqatçıların fikrincə, bu biologiyadan ilhamlanan yanaşma, Marsın geniş qum dənizlərində fəaliyyət göstərən roverlərin gələcəkdə daha etibarlı və səmərəli hərəkət etməsinin yolunu aça bilər.